研究・開発事業
研究・開発事業
RESEARCH
ロボットテクノロジー
当社のロボット・ドローン開発は、2015年度に会津大学ロボットバレー事業に参加したことが始まりです。
StageⅠ(2015~2017年度)では、OpenーRTMをミドルウェアとして、ドローン、画像処理、通信に関するRTCの開発に携わりました。
StageⅡ(2018~2020年度)では、クラウドロボティクスの中のRDRを担当してきました。
これらをきっかけとして、ドローンの「高高度3次元隊列飛行システム」、廃炉に向けた「水中ロボット」、JAEAの研究開発案件に広がっています。
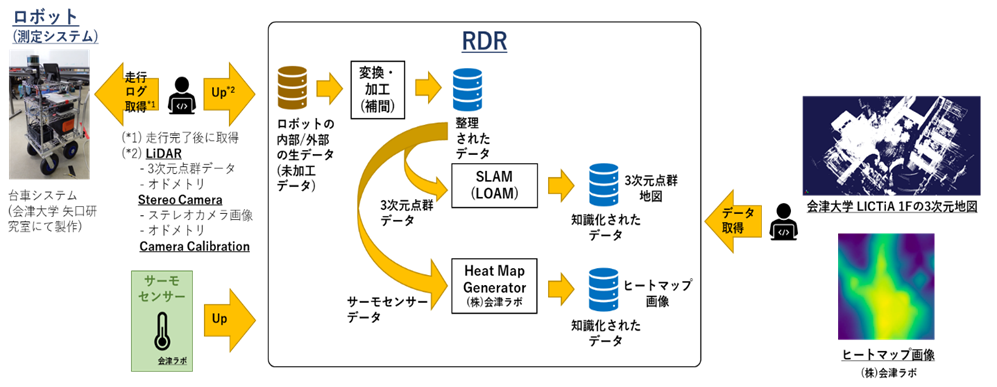
会津大学(ロボットデータリポジトリ)
当社は公立大学法人会津大学(以下、会津大学)と「産学連携ロボット技術開発支援事業」および、「産学連携ロボット研究開発支援事業」に参画しました。その事業の中で会津大学と共にクラウドロボティクスによる「異種複数ロボットのデータの利活用」というテーマを設定して研究・開発を行い、主にRDR についての研究開発を担いました。
当社のロボットソフト研究開発はロボットの制御を得意としており、更にそれを活かすためロボットのデータの利活用に取り組んでいます。これらの事業の経験で得られた技術が「ロボット×ICT事業化」における一助になると考えます。
水中ロボット
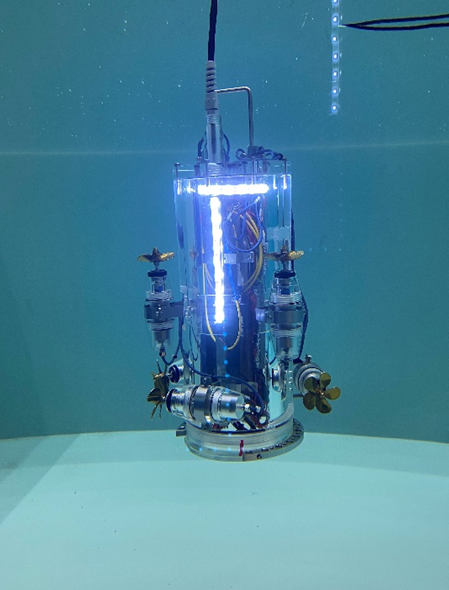
福島第一廃止措置に向けた小型水中探査ロボット・ラドほたるの開発
当社は福島第一原子力発電所の廃止措置に使用できる水中ロボットの開発を行っています。特徴は「小型」「半自律制御」「耐放射線性」です。「小型」は、過酷な環境でも運搬しやすいよう、片手で持てる重量・形状としています。
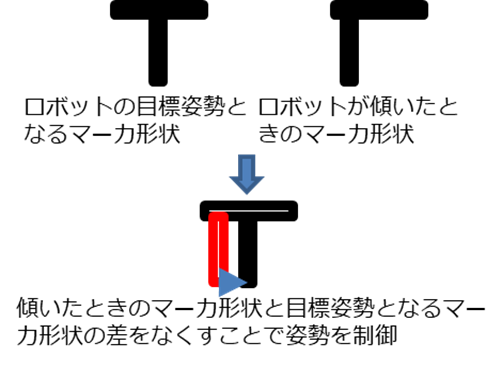
「半自律制御」は、オペレーションの遂行を簡略化するために操縦性の向上を図っています。ロボットに搭載したLEDをマーカとして画像処理で認識し、姿勢と位置を自律的に保つように制御する機能を、佐賀大学と協力し開発しています。
「耐放射線性」は、各部品に対して照射試験を実施し、耐久性や影響が出る累積値を評価し、部品選別を行うことで、耐放射線性のあるロボットにしています。