研究・開発事業
研究・開発事業
RESEARCH
廃炉技術研究
福島県浜通りの地元企業として、福島第一原子力発電所の廃炉措置に積極的関わりたいと考えています。
日本原子力研究開発機構 楢葉遠隔技術開発センターの研究開発案件では、点群データに対する物体認識、物体補間、セグメンテーションなどの機能開発を行っています。
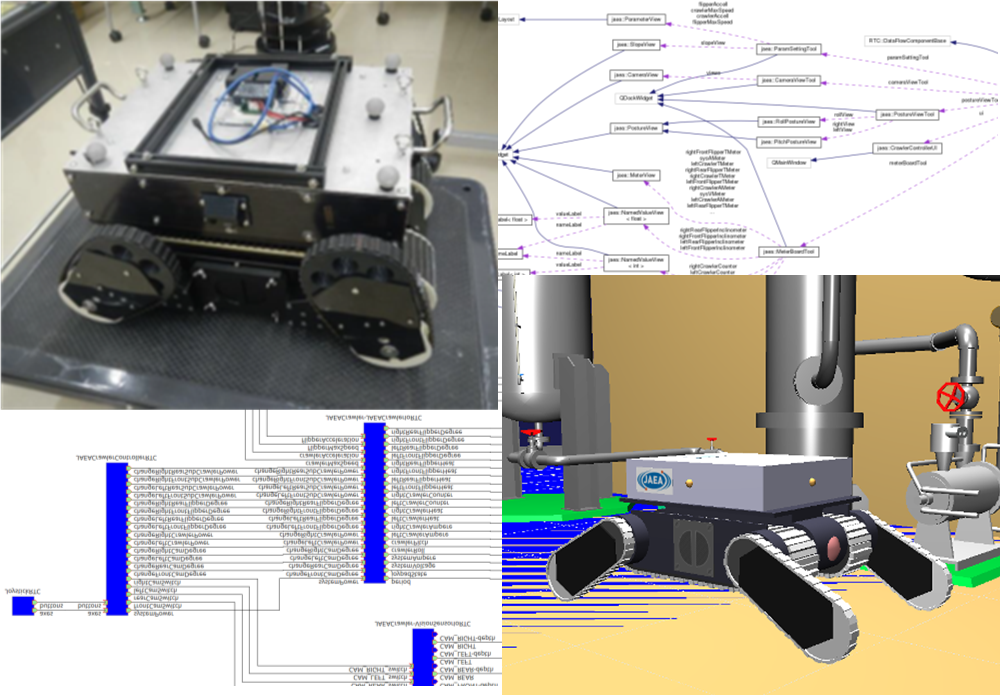
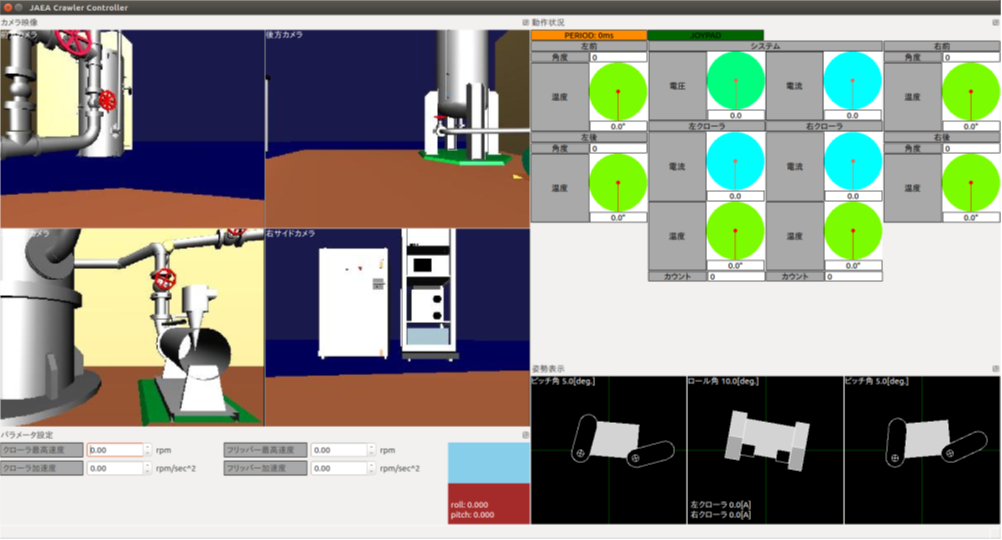
廃炉用クローラー型ロボットシミュレーション
廃炉作業研究用クローラー型ロボットに対するシミュレーションシステムの開発を行いました。 シミュレーション基盤には産総研で開発されたコレオノイドとOpenRTMを用いています。 同時に3Dロボットモデルの作成も行っています。PS4コントローラーを用いて、シミュレータ内のロボットを操作できます。 物理演算エンジンとして、コレオノイド標準のAISTエンジンおよび商用のAGX Dynamicsエンジンに対応しました。 2つのメインクローラーをはじめ、4つのサブクローラー、4代の仮想カメラを動かせます。
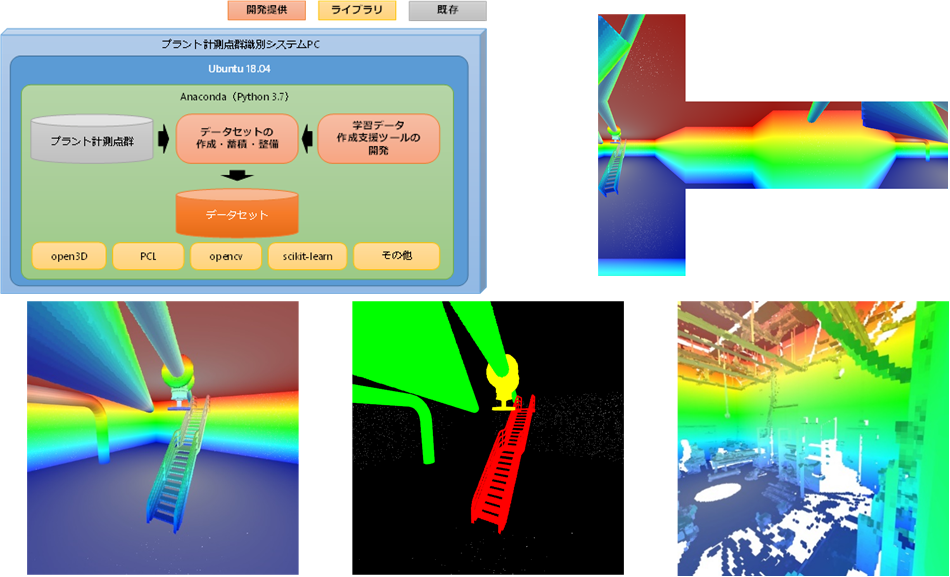
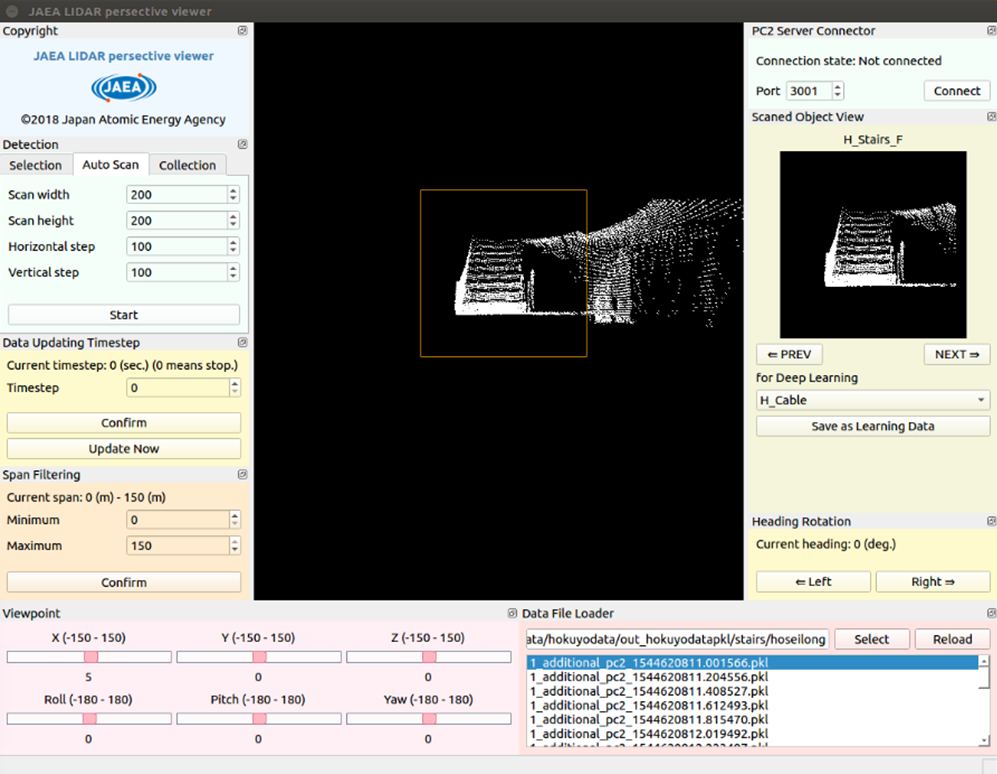
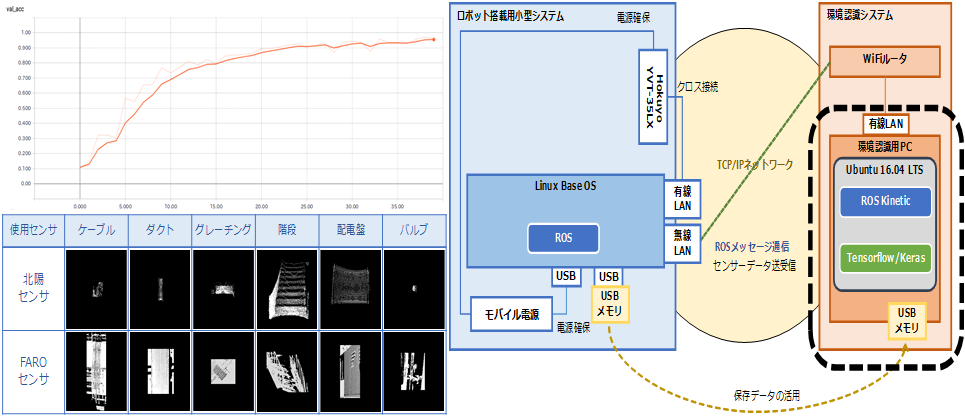
深層学習による三次元物体識別
廃炉作業では、高放射線量下のためロボットによる作業が行われる場合があります。 その作業環境においては瓦礫等の障害物が点在しており、接触してしまうと転倒や損壊といったリスクが生じるため、自機の位置と障害物の種類や距離を正確に測定することが重要になります。
このシステムは無照明の作業環境の三次元構造・性状を計測、識別するためのシステムを提供することを目的としました。
RGBカメラによる環境の把握に加えて、暗所でも計測が可能なレーザスキャナを用いた計測を組み合わせることで、多様な環境に対応する計測を可能とし、識別部分については深層学習を使用した物体識別機能を提供しています。システム基盤にはROSを用いています。
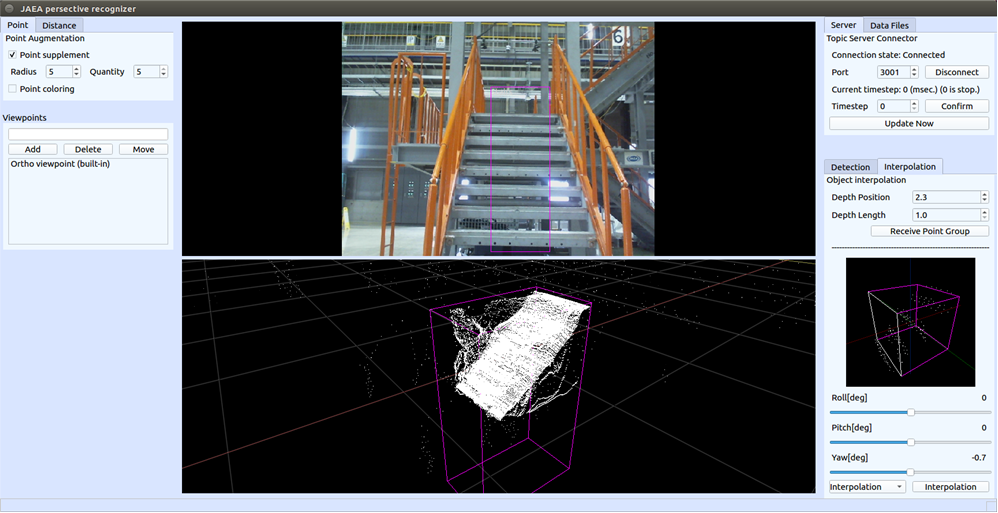
GANを用いた廃炉環境データの三次元物体補間
点群データ(point cloud data)は、レーザスキャナ装置の位置を原点とした投影型データであるため、物体の裏側の情報は測定できません。 そのため、点群データから物体形状を再現するには、多地点測定により集積された点群データの合成が必要となります。 しかしそのような測定は時間と手間が大きく、廃炉環境ではさまざま制約により十分な点群データを集積できない場合も考えられます。 そこで、点群データの欠落部分を擬似的に補間することで、物体の形状を再現する技術の開発に取り組みました。 このシステムでは、画像補間・修復技術として、深層学習の応用手法であるGAN(敵対的生成ネットワーク)を用いた当社独自のアルゴリズムを開発しました。
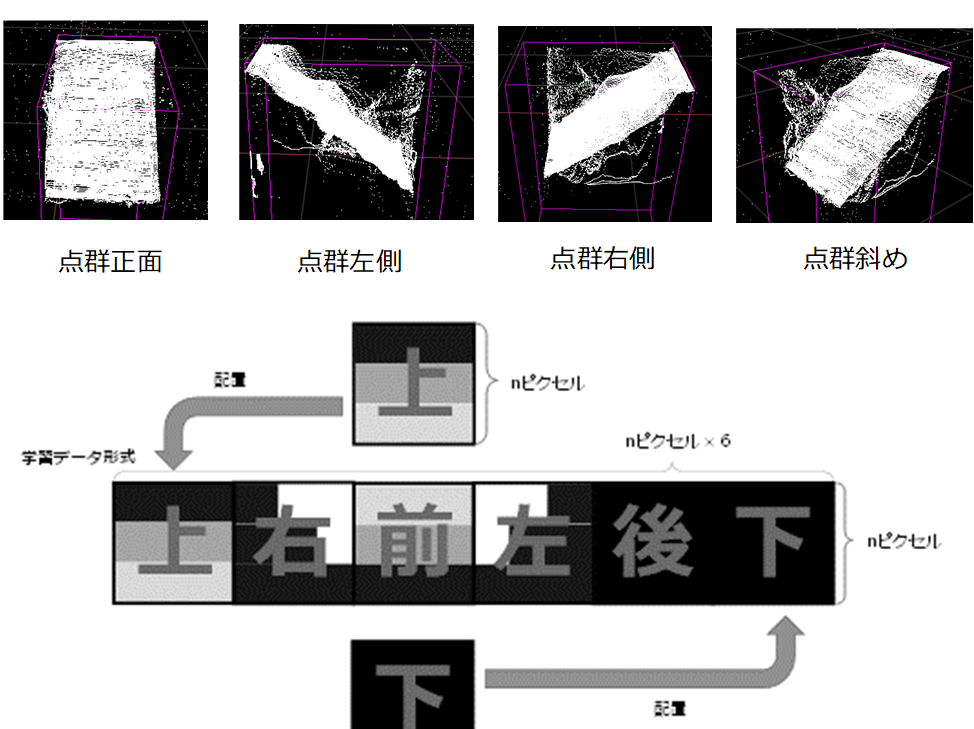
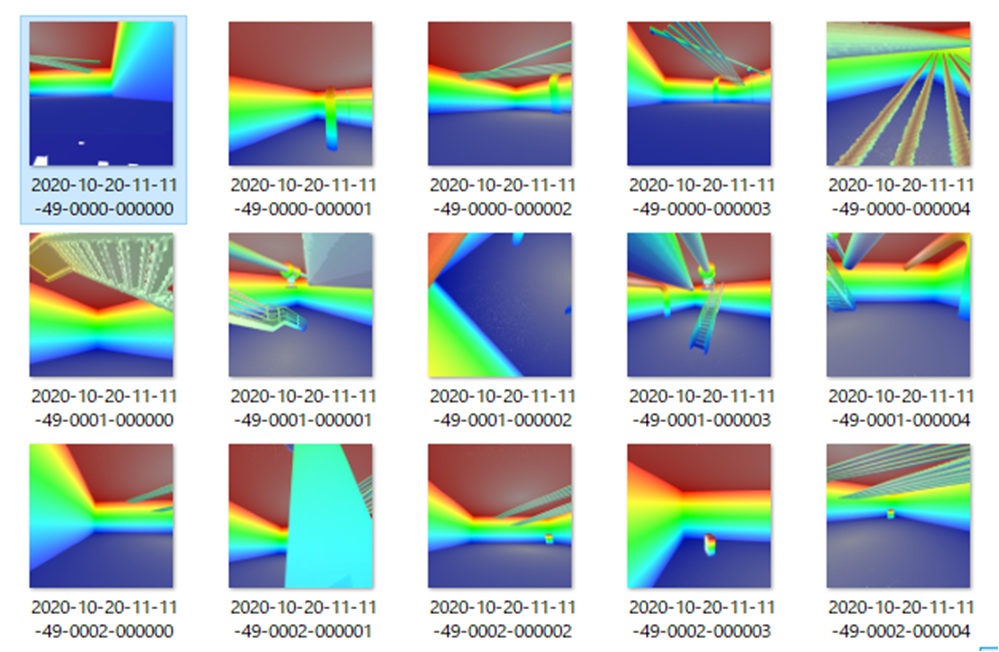
廃炉プラント用三次元セグメンテーションデータセット生成ツール
廃炉作業支援に向けたプラント計測点群の識別のため、レーザスキャナにより計測した点群データから対し、深層学習によるセグメンテーション技術であるDeepLab向けの学習データセットの自動生成に取り組みました。 このため任意の数の3Dモデルを仮想環境上に配置し、点群化した後にHHA変換を行っています。 仮想カメラをランダムに移動させながら様々な方向から撮像し、学習データとマスク画像を同時に生成します。 また、同時にキューブマップ画像も生成し、六面体による3D空間把握ができるようなっています。