 研究・開発事業
研究・開発事業
RESEARCH
ドローンテクノロジー
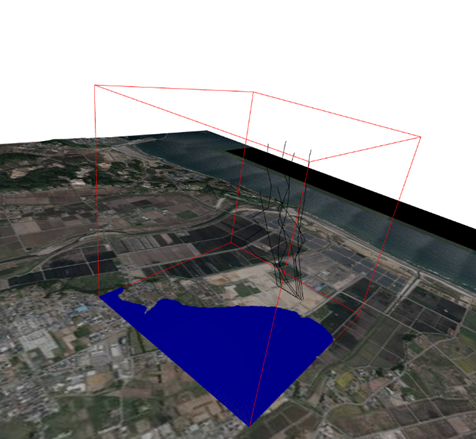
当社は最大27機のドローンを同時に制御し、最大高度2,000mまでの飛行を可能とする『高高度3次元隊列飛行システム』を保有しています。
この技術をベースに上空における気温、気圧、湿度、風向、風速といった気象データのリアルタイム観測を可能とする『環境調査ドローン』、災害現場の状況を迅速に把握、重い資機材等の運搬を可能とする『災害対応ロボット』システム等の研究開発をしています。
自動誘導ドローン
「ミッションコンプリート」のコンセプトに基づき開発した、対象物へピンポイントでドローンを自動誘導する技術である「S・M・A・R・T」(System for Multivisual Adaptive Ranging Tracking)についてご紹介します。
この技術を応用することにより、これまで人が実施していた危険な作業や、時間・コストがかかる作業をドローンに置き換え、更に自律飛行により熟練の操作技術を必要としない、危険を回避し短時間・低コスト・安全な作業が行えるようになります。
環境調査ドローン
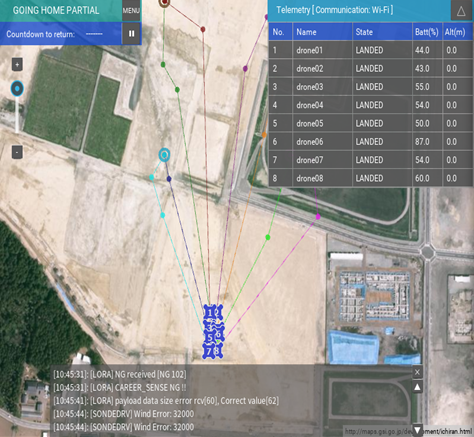
現在の気象観測では、集中豪雨など災害対策のためメソスケール気象の数値予報モデル化精度向上が求められています。ドローンを対地高度1,200mまで隊列飛行させることにより、従来はデータ取得が困難であった様々な三次元メソスケール空間情報をリアルタイムに収集できる方法の確立を目的として開発が進められています。
複数台のドローンを気象観測ポイントまで衝突させずに安全に誘導するための衝突回避経路自動生成機能(特許取得)や、機体テレメトリおよび機体に搭載されるカメラの映像を長距離伝送するための長距離多点無線通信機能、長距離多点映像伝送機能等を開発しました。これらの技術開発により最大8機のドローンによる高度1,200mでのリアルタイム気象観測を実現しました。

災害対応ロボット
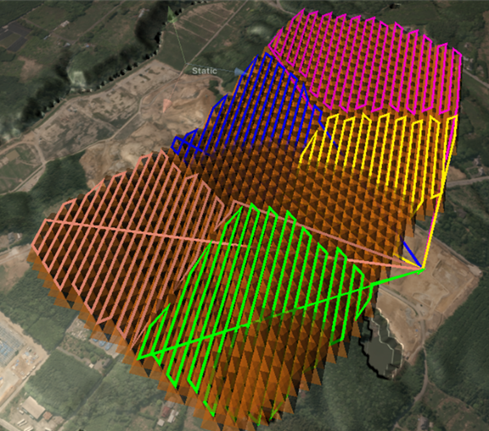
総務省消防庁による「消防防災科学技術高度化戦略プラン」(平成30年3月)にある「社会実装に必要な種な課題」の一つとして挙げられている「平常時ほど十分な人的資源を確保できないこと」の解決を目的として開発を進めています。
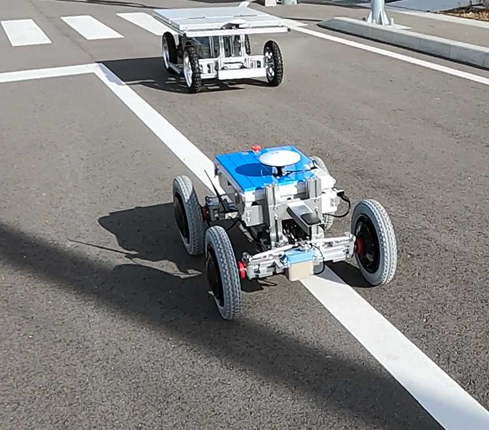
災害現場の状況把握のための撮影を漏れなく網羅することを目的とする撮影位置自動生成機能を開発しました。また、同一機種のみならず異なる飛行制御ソフトウェアを搭載したドローンを組み合わせての一斉飛行および静止画撮影を行うことで災害現場の迅速な状況把握を可能とします。このシステムはドローンのみならずUGV(無人地上車両)もサポートし、UGVを利用した資機材の運搬を実現しました。また、先導隊員が保持するビーコン装置を自動追尾する機能の開発を予定しており、システムの実用化による搬送能力の向上を目指しています。


ドローンセキュリティ
NEDO 国立研究開発法人 新エネルギー・産業技術総合開発機構「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト ロボット・ドローン機体の性能評価基準等の開発 性能評価基準等の研究開発 無人航空機に求められる安全基準策定のための研究開発」における、 東京大学受託研究テーマ「無人航空機に求められる安全基準策定のための研究開発」内の会津大学再委託分テーマ「OSSドローンシステムセキュリティガイドラインに資する性能評価基準の研究」を受けて、 2020年度は「OSSドローンシステムセキュリティ解析のためのドキュメント化作業及びセキュリティ解析実験補助」業務に取り組みました。
